Spectre

Launch Vehicle Summary
Spectre Mk1, also known as Spectre or simply Mk1, is an experimental high-powered rocket being used to develop an active-stabilization system for future ERPL rockets by using small forward control surfaces called canards to adjust its orientation. The end goal is to achieve a vertical, roll-less flight in any reasonable launch environment.
Spectre is 99 inches tall, 5.5 inches in diameter, and has a takeoff weight of about 31 pounds. Depending on its motor selection, Spectre has an apogee ranging from 5000 to 7000 feet. Spectre's payload is the Spectre Module, the attitude control system that the project is focused on. This device is what we are developing to achieve our vertical, roll-less flight.
First Launch
On January 15, 2022, Spectre had its first official launch. The purpose of this flight was data acquisition and ensuring the onboard electronics work as expected before performing an actively stabilized launch. The launch itself was a success but not without lessons learned and room for improvement. We discovered multiples areas where our Standard Operating Procedures (SOP) could be improved as well as unexpected issues when running the software the moment of launch. None of these items prevented the launch but did spark the need for a review and redesign of certain components, and have since been resolved. Attached are photos from the event.



Thanks to An Tran for taking taking the photos and providing his services. Our next launch is set for November 19, 2022. Our aim is to successfully perform an actively stabilized launch.
Full Gallery Link
Launch Video
Flight Computer
The flight computer is the most important part of the Spectre Module. This computer has a variety of sensors and devices that allow it to determine the vehicle's situation and to record data. The major components of the flight computer include one 9-axis orientation sensor, one 3-axis high-G accelerometer, one barometric pressure sensor, an SD card module, a power supply, and outputs to control servo motors.
Three iterations of the flight computer exist. The first one, designed as a shield for an Arduino Mega, contained all of the sensors listed above except for the high-G accelerometer. The computer required separate batteries for the computer itself and the servo motors. This iteration of the flight computer suffered defects, and was not able to manipulate the canards. The layout of the computer also made it very difficult to work with when installed in the Spectre Module. This board was flown on Spectre's first flight as a data recording device only, a task that it was mostly successful with.
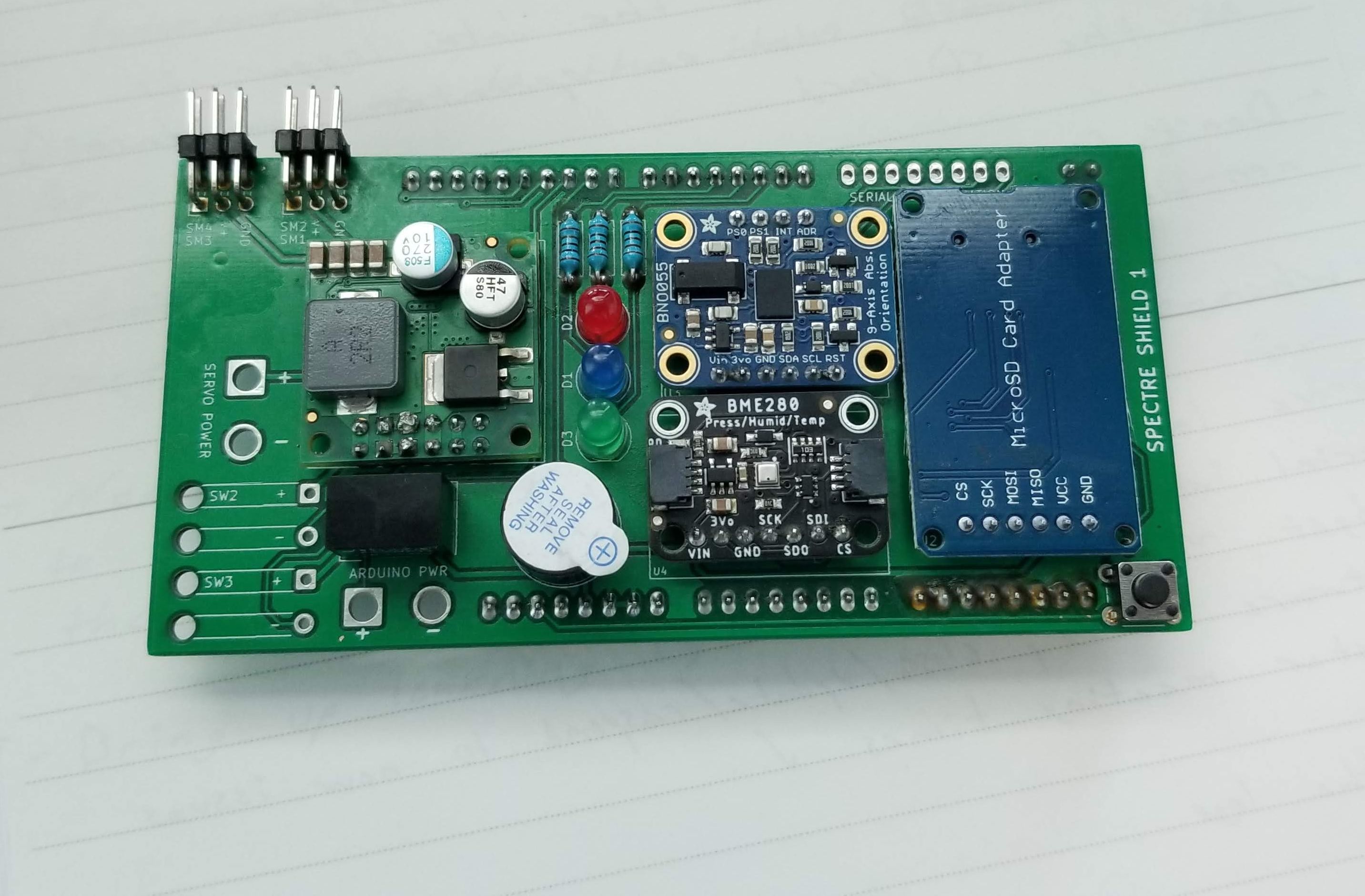
- First iteration flight computer (Spectre Shield 1).
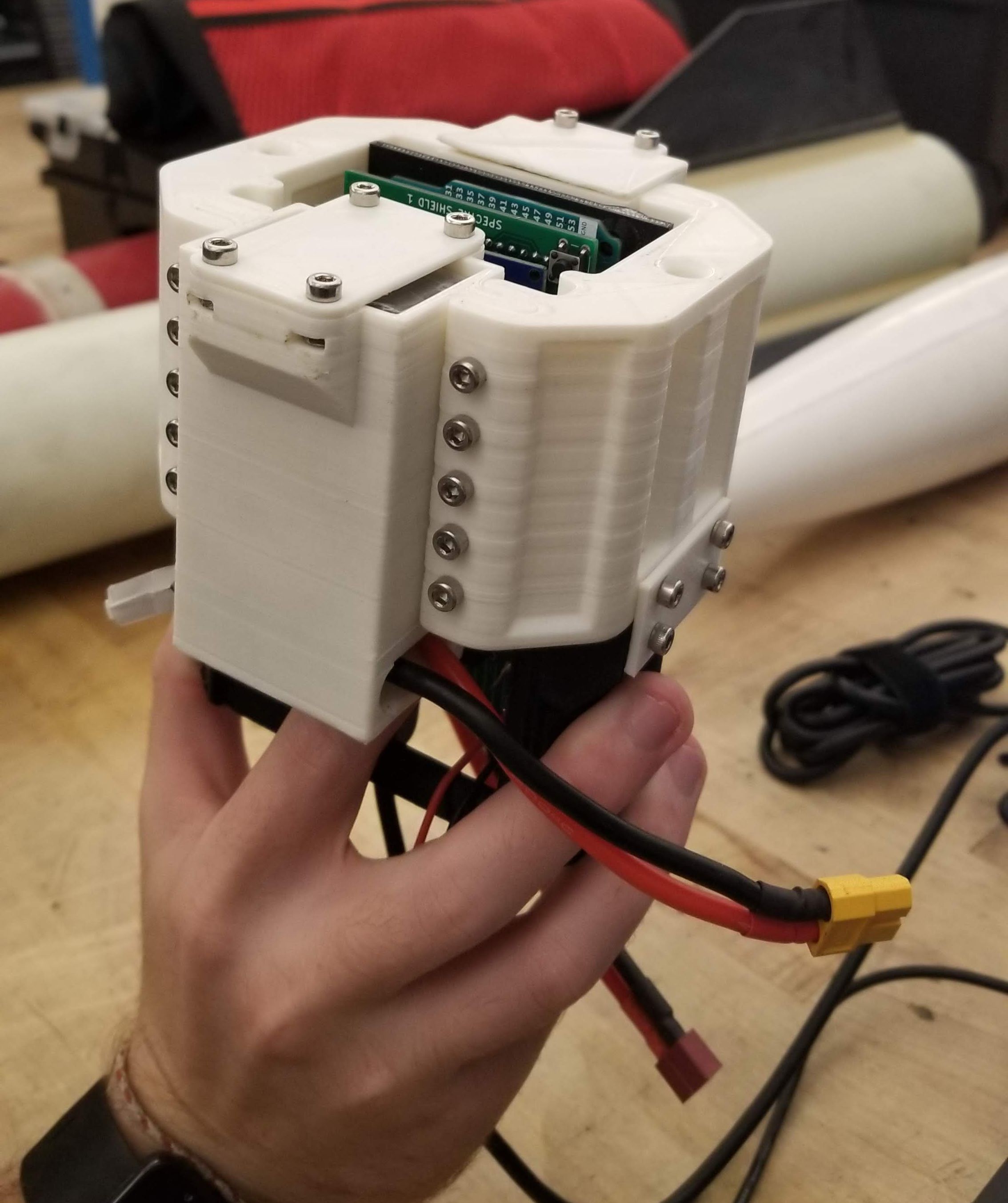
- Spectre Shield 1 installed
The second iteration of the flight computer, and the latest version of the flight computer fixes some of the biggest issues with the original computer. The layout of the board was completely changed so that it become much easier to work with in the Spectre Module, and many of the electrical issues that the original computer suffered from were fixed. Otherwise, it is very similar to the original computer in that it is a shield for an Arduino Mega and does not possess a high-G accelerometer. This board never has and never will fly, but it was successfully used to perform wind tunnel testing of experimental canard planforms in the MicaPlex Wind Tunnel Facility.
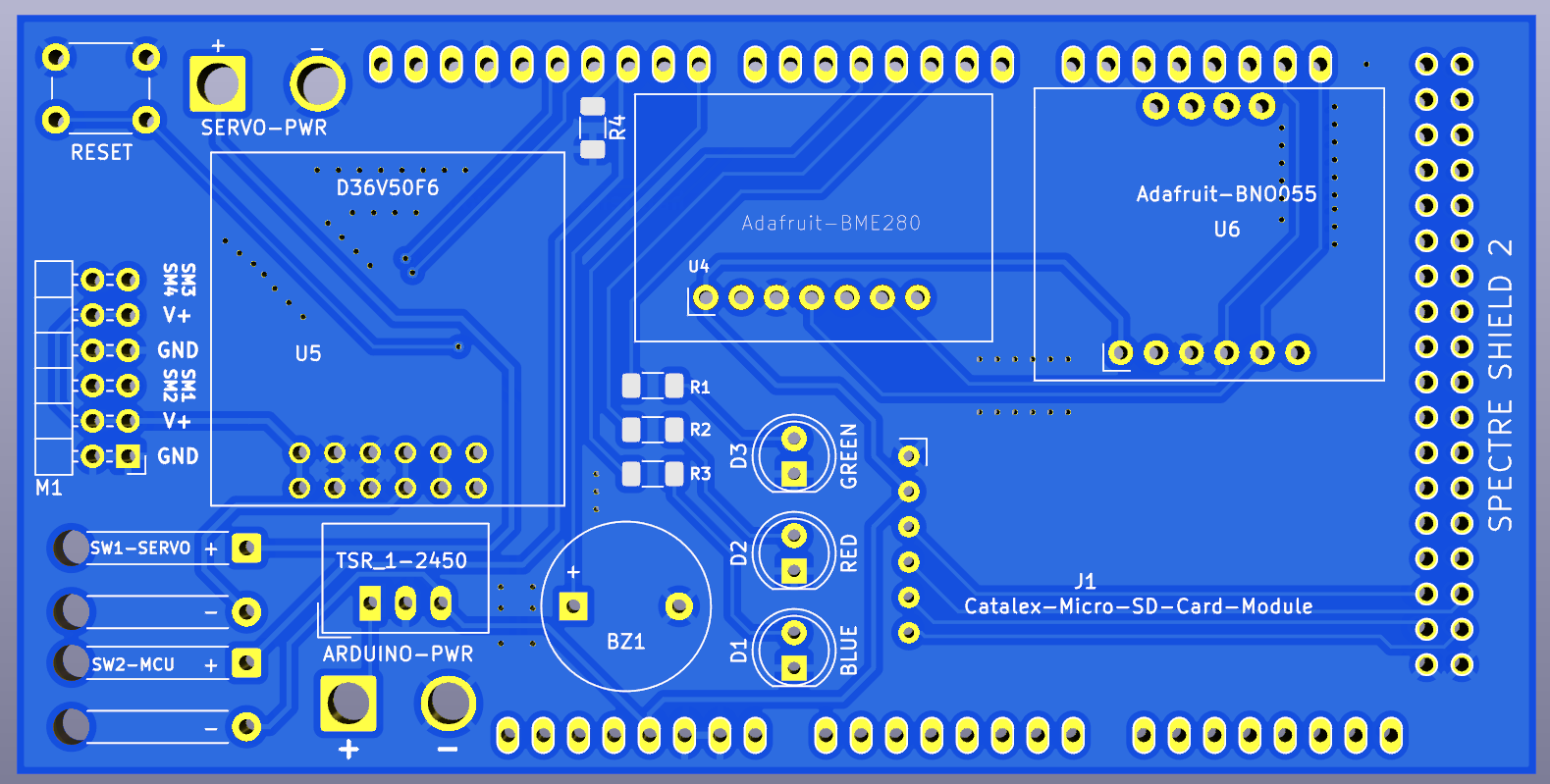
- 2nd iteration flight computer (Spectre Shield 2).
The third iteration of the flight computer is a complete redesign of the original 2, only having most of the sensors in common. Instead of being a shield for a microcontroller, it is its own standalone unit, with the microcontroller being a component of the board. The microcontroller was upgraded from the Arduino Mega to a Teensy 4.1 microcontroller, which is superior to the Arduino Mega in nearly every way. This design also includes a high-G accelerometer, and uses a single battery for both the computer itself and the servo motors. Since it is designed to be attached to the actuator housing, it does not need a heavy and cumbersome sled. This flight computer will be manufactured by the end of Summer 2022, and is expected to fly in Spectre's second flight.
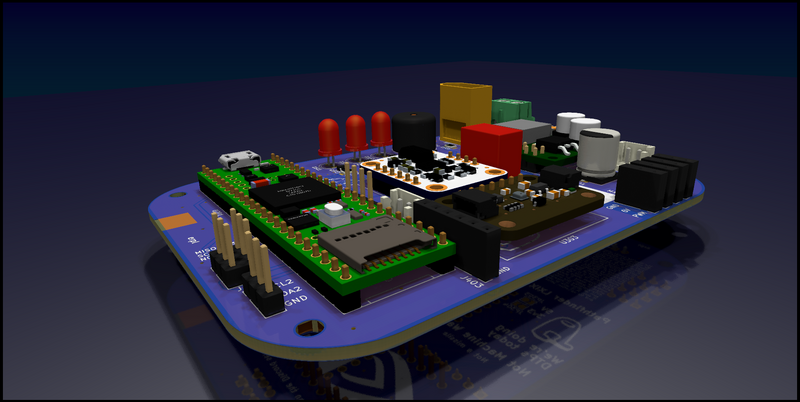
- CAD rendering of the 3rd iteration of the flight computer.
Spectre Module
The Spectre Module is the payload and central focus of the project. It contains our in-house flight computer, servo motors, and power supplies. The Spectre Module is the attitude control system that we are developing so that we can achieve a roll-less, vertical flight. The Spectre Module is built around its flight computer, an ERPL-designed device used to determine the vehicle's situation and respond to it. The Spectre Module currently controls a pair of canards which are used to eliminate roll from our flights. These canards are actuated by a pair of servo motors which are themselves contained in a purpose-built housing. It is designed to control roll by actuating two canards that are mounted to it.

- 1st iteration flight computer installed within the Spectre Module. Note the bulky upper sled.
Spectre Software
Spectre Software is the branch that develops all of our flight computer software as well as any non-MATLAB software that supports it. This branch ensures that the Spectre Module can collect data about its surroundings, act on the data it gathers, and store it for post-flight analysis. The controller that is being developed for the Spectre Module is also designed in Spectre Software.
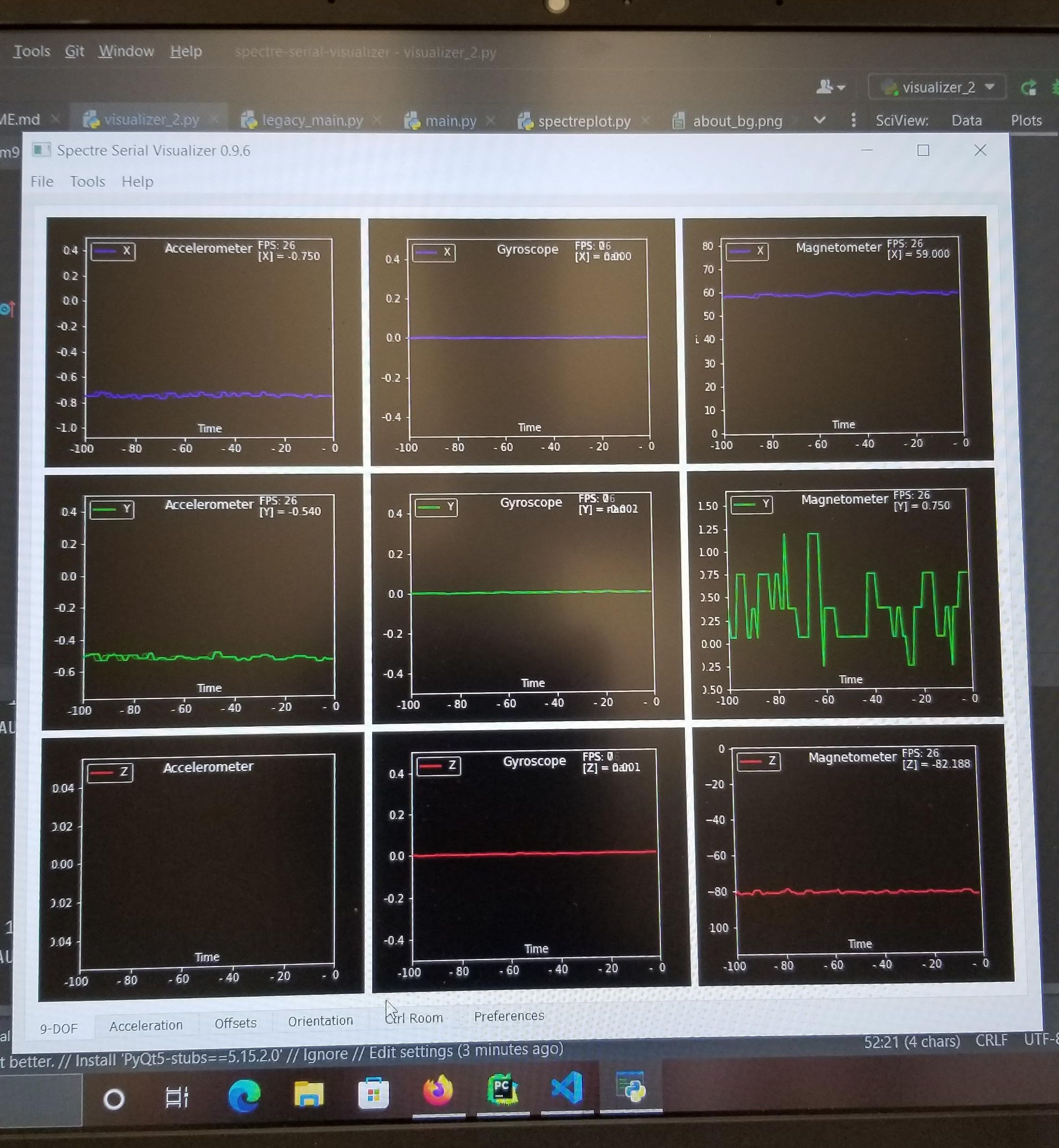
- Running visualizer script by our project mentor, Ethan Eymontt
The flight control software is programmed using the C++ language. It is structured as a finite state machine, where the actions the software takes is based on the state of the vehicle. Examples of states include power up before arming, armed on the pad, in-flight, and landed. The software transitions between states based on direct inputs and information it collects. The software is capable of calibrating its own sensors on its own before a flight. During flight, directly collects acceleration, angular velocity, magnetic field strength, atmospheric pressure, and temperature. It uses this information to compute its absolute orientation, velocity, and altitude. This information is fed to the PID controller, which outputs a servo response angle. The software can detect various flight milestones such as launch, motor burnout, apogee, and landing. Additionally, the software saves every state change, calibration value, and data point recorded during flight to a non-volatile memory. The software is capable of Software In The Loop (SIL) and Hardware In The Loop (HIL) testing and can interface with an orientation visualization script. Currently, the controller is mostly implemented, with only the PID gains and a couple of other parameters still left to be determined. As of present, this software is the only one that ERPL has designed that has functioned successfully in flight.
Flight Dynamics Simulator
The Flight Dynamics Simulator, commonly referred to as the Modeler, is the 6-Degree of Freedom (6-DOF) flight simulator that we are developing in-house with the express purpose of providing Hardware In The Loop Testing to the Spectre Module. With this, it is possible to test and tune the controller as much as possible without actually performing a test launch. That way, we can greatly increase the probability that the controller will work as designed.
The modeler is mostly based in Simulink. We model the vehicle's physical traits such as its mass, moments of inertia, size, and aerodynamic characteristics (generic lift, drag, moment coefficients). The performance of its rocket motor modeled based on thrust curve data from the manufacturer. We model wind forces in order to induce perturbations in the model. We use this to simulate flights as realistic as possible. With a 6-DOF model developed, we can use the information about the simulated vehicle to simulate the data that the Spectre Module would receive from its sensors during a real flight. Information about the state of the vehicle is sent to the Spectre Module, which then processes it, sends it to its controller, and reports back a canard deflection angle. The forces and moments that the deflection would generate are then modeled every timestep, and the process repeats throughout the entire simulated flight.
Currently, the modeler's flight model is nearly complete, with just a few minor bugs to clear up. After this, we will begin using the data from the modeler to begin ground testing our controller in order to validate its performance for Spectre's second flight.